Der Gleichstrommotor ist eine elektrische Antriebsmaschine. Er wird auch als Gleichstrommaschine bezeichnet, da er als Motor und auch als Generator betrieben werden kann.
Aufbau
Der Gleichstrommotor besteht aus einem feststehenden Eisenteil, dem Ständer und einem beweglichen Eisenteil, dem Läufer. Der Ständer setzt sich zusammen aus dem Joch, an das die Erregerpole angebracht sind. Jeder Erregerpol trägt eine Erregerwicklung. Der Läufer, auch Anker genannt, besteht aus einem Bleckpaket auf einer Welle, in dessen Nuten sich die Ankerwicklungen befinden.
Funktionsweise
Werden die Erregerwicklungen an ein Gleichspannunsnetz angeschlossen, fließt ein Strom und ein Magnetfeld, das Erregerfeld baut sich auf. Die Ankerwicklungen werden ebenfalls an eine Gleichspannungsquelle angeschlossen und bilden auch ein Magnetfeld aus. Das Erregerfeld kann nun auf den drehbar gelagerten Anker wirken und setzt diesen in Bewegung (Lorentzkraft). Damit sich eine fortlaufende Drehbewegung ergibt, muss die Ankerwicklung in der neutralen Zone, d. h. in in dem Bereich in dem sich die Kräfte auf die Leiterschleife ausgleichen, umgepolt werden. Dies geschieht durch einen Kommutator. Es entsteht ein Drehmoment, das proportional zum Produkt aus Ankerstrom und dem magnetischen Fluss des Erregerfeldes ist.
Durch die Drehbewegung entsteht im Anker die Gegenspannung. Sie wird durch die Drehbewegung des Ankers verursacht, der sich im Erregerfeld bei Drehung wie ein Generator verhält. In seinen Windungen wird bei Flussänderung eine Spannung entgegen der Antriebsspannung induziert, die Gegenspannung. Die Gegenspannung ist abhängig von der Drehzahl und dem magnetischen Fluss der Erregerwicklung.
Wechselwirkungen zwischen Erregerfeld und Ankerfeld
Das Erregerfeld wird durch das Ankerfeld beeinflusst, die sogenannte Ankerrückwirkung, wodurch ein resultierendes Erregerfeld entsteht. In diesem verzerrten Gesamtfeld wird die neutrale Zone um einen Winkel Alpha verschoben. Dadurch ist der magnetische Fluss in der Ankerspule währen der Kommutierung unterschiedlich und es wird eine Spannung induziert. Diese Spannung verursacht das sogenannte Bürstenfeuer am Kommutator. Des weiteren wird das Erregerfeld geschwächt, da die Feldschwächung an der einen Polschuhkante aufgrund der Eisensättigung nicht an der anderen Polschuhkannte ausgeglichen werden kann. Diese Feldverzerrung kann auch für Rundfeuer sorgen, da an benachbarten Ankerleitern, die den Polschuh passieren, unterschiedliche Spannungen induziert werden, was zu einer Potentialdifferenz und damit zu Überschlägen führen kann.
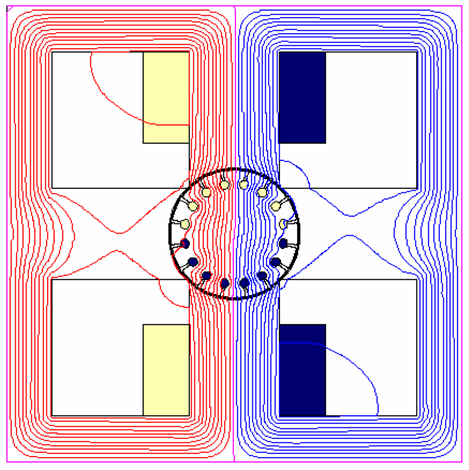
Ankerrückwirkung in FEM-Simulation einer Gleichstrommaschine
Um das Bürstenfeuer zu verhindern, kann man die Bürsten entgegen der Drehrichtung verschieben. Da die Ankerrückwirkung und damit die Verschiebung der neutralen Zone abhängig vom Ankerstrom ist, müsste man die Bürstenverschiebung der Belastung anpassen. Man wählt daher eine mittlere Büstenverschiebung für einen einigermaßen funkenfreien Lauf. Die Bürstenverschiebung wird nur bei kleinen Motoren bis zu einigen 100W Leistung angewendet.
Bei mittleren und großen Maschinen korrigiert man die Feldverzerrung durch sogenannte Wendepole. Diese werden um 90° versetzt zu den Hauptpolen angebracht und werden vom Ankerstrom erregt. Das Feld der Wendepole wirkt dem des Ankers entgegen und hebt so die Verschiebung der neutralen Zone auf.
Die Feldverzerrung an den Hauptpolen wird durch an den Polschuhen untergebrache Kompensationswicklungen beseitigt. Diese werden ebenfalls vom Ankerstrom durchflossen und sind so konstruiert, dass sie die Durchflutung der Ankerwicklung hier aufheben. Kompensationswicklungen müssen überwiegend bei großen und schnell laufenden Maschinen angewendet werden.
Betriebsverhalten
Bei der Verschaltung eines Gleichstrommotors werden die Wendepol- und die Kompensationswicklung stets gegenreihig zur Ankerwicklung geschaltet. Bei der Erregerwicklung gibt es zwei Möglichkeiten. Sie wird entweder in Reihe mit der Ankerwicklung geschaltet, der sogenannte Reihenschlussmotor, oder parallel zum Anker, beim Nebenschlussmotor. Der Ankerwicklung kann ein Anlasswiderstand vorgeschaltet werden, der den Anlassstrom begrenzt. Außerdem wird beim Nebenschlussmotor im Allgemeinen ein Feldsteller verwendet, um den Erregerstrom zu steuern.
Das Betriebsverhalten von Reihenschlussmotor und Nebenschlussmotor ist unterschiedlich:
Nebenschlussmotor
Beim Nebenschlussmotor steigt das Drehmoment linear mit dem Ankerstom.
Die Drehzahl sinkt mit zunehmender Belastung. Um ein größeres Drehmoment abverlangen zu können, muss der Ankerstrom und damit der Spannungsabfall am Anker größer werden. Dies ist jedoch nur möglich, wenn die Gegenspannung sinkt, also die Drehzahl abnimmt.
Beim Nebenschlussmotor besteht die Gefahr des Duchdrehens! Hier kann durch ein Abschalten oder einen Ausfall der Erregerwicklung der Fall auftreten, dass der Erregerfluss nahezu 0 wird. Damit wird auch bei zunehmender Drehzahl keine wirksame Gegenspannung induziert, die den Ankerstrom und so das wirksame Drehmoment reduzier. Die Drehzahl kann immer weiter ansteigen. Die Erregerwicklung eines Nebenschlussmotorsdarf daher nicht abschaltbar oder einzeln abgesichert sein, da eine Feldschwächung im Abschaltmoment eine enorme Drehzahlzunahme bis zur Zerstörung des Motors zur Folge hätte.
Reihenschlussmotor
Beim Reihenschlussmotor steigt das Drehmoment quadratisch mit dem Ankerstrom, da der Ankerstrom auch das Erregerfeld beinflusst.
Auch beim Reihenschlussmotor sinkt die Drehzahl mit der Belastung. Es ergibt sich aber eine stärkere Änderung, da durch den Stromanstieg auch das Erregerfeld verstärkt wird, was eine höhere Gegenspannung zur Folge hat. Um dies wieder auszugleichen muss der Motor noch langsamer drehen. Im Leerlaufbetrieb kann der Reihenschlussmotor eine enorme Drehzahl erreichen, da aufgrund des geringen Laststroms im Anker auch das Erregerfeld sehr schwach ist und der Anker somit nicht mehr abgebremst wird. Theoretisch kann ein Reihenschlussmotor im Leerlauf daher durchdrehen! In der Praxis geschieht dies eher selten, da aufgrund Lagerreibung und Luftreibung sowie eine üblicherweise angeschlossene Arbeitsmaschine immer ein Lastmoment anliegt.
Steuerung
Eine Möglichkeit der Drehzahländerung bei beiden Motorarten ist die Änderung der Ankerspannung über einen Anlasssteller. Dadurch wird der Ankerstrom und damit die Drehzahl verringert. Man kann hierdurch alle Drehzahlen unterhalb der Nenndrehzahl fahren, hat jedoch Verlustleistung. Außerdem sind die Drehzahlschwankungen bei Laständerung stärker, da eine viel geringere Spannung zur Verfügung steht um den nötigen Strom durch den Anker zu treiben. Er muss also bei gleicher Last mit eingeschaltetem Anlasssteller noch langsamer laufen, als ohne.
Eine verlustleistungslose und stromunabhängige Veränderung der Ankerspannung ist mit Tyristoren möglich.
Oberhalb der Nenndrehzahl lässt sich eine Drehzahländerung durch Schwächung des Erregerfeldes erreichen, da dies ja eine Drehzahlzunahme zur Folge hat. Die Stromstärke der Erregerwicklung wird durch einen Feldsteller verändert.